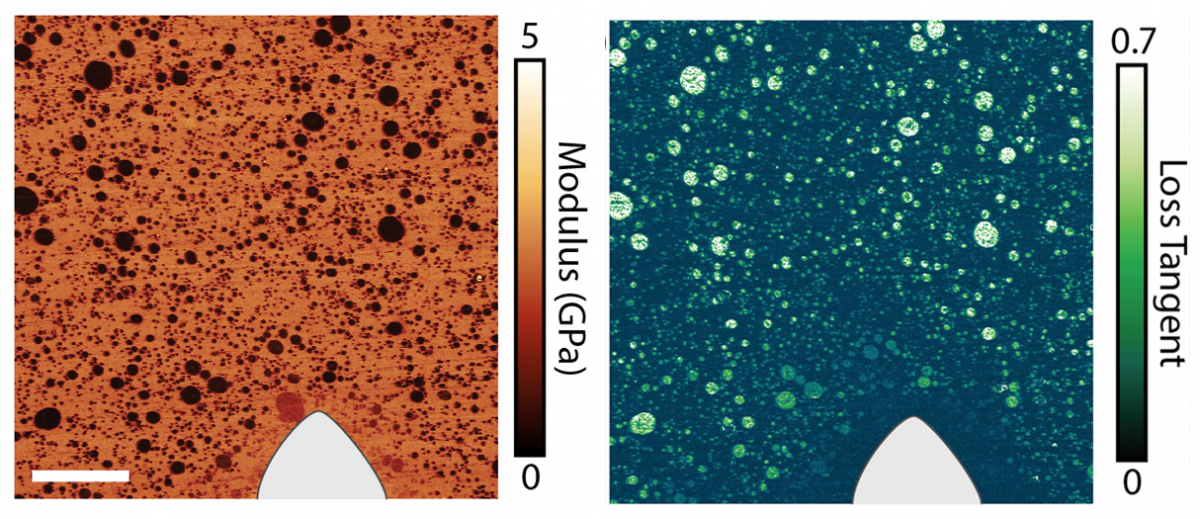
The mechanical behavior of 3D printed polymer materials is often degraded compared to those fabricated through traditional manufacturing techniques. AFM offers the ability to investigate the processing-induced structural changes that bring about these modified mechanical properties through local property mapping. We have probed the influence of rubber particle phase segregation in the weld zone of FFF-printed ABS on the weld strength of printed layers [1].
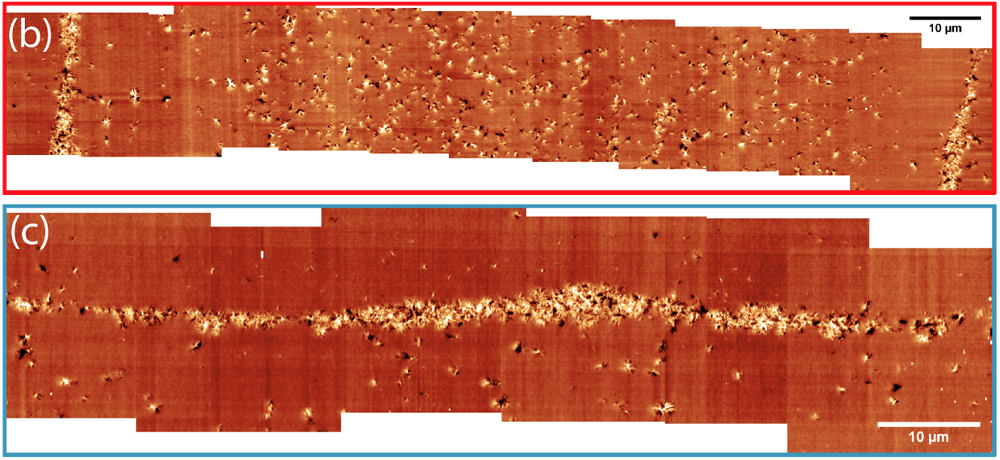
FFF-printed PEEK components generally suffer degraded mechanical integrity relative to traditional bulk-processing. We implemented AFM to investigate the role of surface crystallization in degraded weld strength between printed layers, offering insight into future efforts to retain the mechanical robustness of 3D-printed PEEK materials [2].

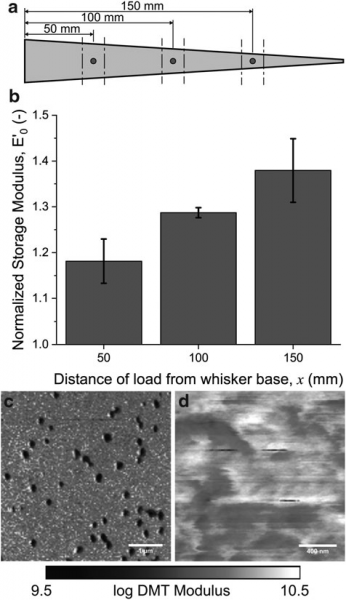
We have also utilized AFM to observe phase migration in commercially available polycarbonate filaments after surface conforming fiber drawing to create artificial whiskers for robotic sensing applications inspired by rat vibrissae, helping to understand the observed modulus along the whisker axis [3]. Studies such as these provide insights into the structure-processing-property relationships of 3D printed materials, thereby aiding in identification of optimized processing conditions for mechanical robustness .
Active Researcher on the Project:
Relevant Publications
[1] Collinson, D. W., Kolluru, P. V., Von Windheim, N., & Brinson, L. C. (2021). Distribution of rubber particles in the weld zone of fused filament fabricated acrylonitrile butadiene styrene and the impact on weld strength. Additive Manufacturing, 41, 101964.
[2] Collinson, D. W., von Windheim, N., Gall, K., Brinson, L. C. (2022). Direct Evidence of Interfacial Crystallization Preventing Weld Formation During Fused Filament Fabrication of Poly(ether ether ketone). Additive Manufacturing, 51, 102604.
[3] Collinson, D. W., Emnett, H. M., Ning, J., Hartmann, M. J., & Brinson, L. C. (2021). Tapered polymer whiskers to enable three-dimensional tactile feature extraction. Soft Robotics, 8(1), 44-58.